- Паттерны реализации конечных автоматов в Erlang: секреты эффективной автоматизации
- Основные концепции конечных автоматов и особенности в Erlang
- Паттерн "Модель состояниями" в Erlang
- Реализация в коде
- Использование паттерна "Стохастическая модель" в Erlang
- Пример реализации
- Паттерн "Модульный автомат" для масштабируемых систем
- Пример взаимодействия
- Практические советы по реализации автоматов в Erlang
Паттерны реализации конечных автоматов в Erlang: секреты эффективной автоматизации
Когда мы начинаем углубляться в разработку систем‚ требующих обработки сложных состояний и переходов между ними‚ на помощь приходит концепция конечных автоматов. Эти модели позволяют реализовать логику так‚ чтобы она была понятна‚ масштабируема и легко поддерживаемая. Особенно мощным инструментом для этого становится язык Erlang‚ который благодаря своей архитектуре отлично подходит для построения распределённых‚ отказоустойчивых систем.
В этой статье мы раскроем основные паттерны и подходы к реализации конечных автоматов в Erlang‚ поделимся практическими советами‚ лучшими практиками и примерами. В итоге вы не только поймёте‚ как проектировать такие системы‚ но и научитесь использовать мощные механизмы Erlang для их реализации на практике. Итак‚ давайте начнем!
Основные концепции конечных автоматов и особенности в Erlang
Перед тем как перейти к паттернам‚ важно понять базовые концепции конечных автоматов. В классической теории это модели‚ которые состоят из набора состояний‚ входных символов‚ и правил перехода между состояниями. Их особенность — строгое определение логики переходов‚ что делает автомат легко предсказуемым и управляемым.
Однако при реализации в Erlang есть свои особенности:
- Процессы как автомат: каждое автоматическое состояние часто реализуется в виде процесса.
- Использование сообщений: переходы реализуются через передачу сообщений‚ что полностью укладывается в энергетический подход Erlang.
- Отказоустойчивость: система способна восстанавливаться и сохранять состояние с помощью процессов-надстроек и хранения состояния.
Рассмотрим ключевые паттерны‚ делая акцент на практическое использование в реальных сценариях.
Паттерн "Модель состояниями" в Erlang
Это один из самых популярных паттернов реализации конечных автоматов. Он предполагает разделение автоматов по состояниям‚ где каждое состояние, отдельная логика‚ которая может обрабатывать входящие сообщения и переводить систему в новое состояние.
В Erlang этот паттерн реализуется через тормозящие процессы (gen_server или gen_statem)‚ где состояние хранится внутри процесса‚ а переходы — это обновление внутреннего параметра. Рассмотрим пример:
| Состояние | Описание | Действия |
|---|---|---|
| Idle | Автомат в ожидающем состоянии‚ готов к запуску. |
|
| Running | Автомат выполняет задачу. |
|
| Stopped | Завершено выполнение. |
|
Реализация в коде
Все просто — мы создаем модуль‚ основанный на gen_statem‚ где описываем состояние‚ переходы и обработчики сообщений:
-module(my_fsa).
-behaviour(gen_statem).
%% API
-export([start_link/0]).
%% gen_statem callbacks
-export([init/1‚ callback_mode/0‚ handle_event/4‚ terminate/3‚ code_change/4]).
start_link ->
gen_statem:init_ok({local‚ ?MODULE}).
init([]) ->
{ok‚ idle}.
callback_mode ->
handle_event.
handle_event({call‚ From}‚ start‚ State) ->
{next_state‚ running‚ State‚ [{reply‚ From‚ ok}]}.
handle_event({call‚ From}‚ stop‚ running) ->
{next_state‚ stopped‚ running‚ [{reply‚ From‚ ok}]}.
handle_event({call‚ From}‚ resume‚ stopped) ->
{next_state‚ running‚ stopped‚ [{reply‚ From‚ ok}]}.
handle_event(_Event‚ _StateName‚ StateData) ->
{keep_state‚ StateData}.
Данный паттерн хорошо подходит для автоматов‚ которые требуют явной логики переходов и многофазных состояний.
Использование паттерна "Стохастическая модель" в Erlang
Конечные автоматы не всегда должны быть детерминированными. В некоторых случаях мы сталкиваемся с вероятностными моделями‚ где переходы происходят на основе случайных событий или с определенной вероятностью.
В Erlang такое решение реализуется через стратегию "случайных выборов" внутри паттерна. Например‚ в модуле генерирующего события можно вставлять случаи с разными вероятностями‚ реализуемые через функции rand или встроенные библиотеки.
Пример реализации
Допустим‚ у нас есть автомат‚ который с вероятностью 70% переходит в состояние "Активен" и с 30% — в состояние "Пауза".
handle_event({call‚ From}‚ trigger‚ State) ->
P = rand:uniform‚
if
P =< 0.7 ->
{next_state‚ active‚ State‚ [{reply‚ From‚ ok}]};
true ->
{next_state‚ paused‚ State‚ [{reply‚ From‚ ok}]}
end.
Это позволяет моделировать вероятностные сценарии и тестировать системы в условиях неопределенности.
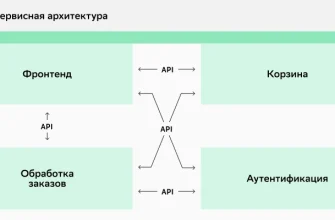
Паттерн "Модульный автомат" для масштабируемых систем
Когда системы растут‚ автоматические схемы тоже требуют модулярности и возможности масштабирования. В Erlang это реализуется через разделение автоматов по компонентам и их взаимодействию.
Ключевая идея, каждый автомат реализуется как отдельный процесс‚ а между ними прослеживаются четкие протоколы обмена сообщениями.
Пример взаимодействия
| Автомат A | Автомат B | Обмен сообщениями |
|---|---|---|
| Запрос на действие | Обработка запроса | <Запрос> |
| Ответ о выполнении | Обработка ответа | <Ответ> |
Такой подход обеспечивает:
- Масштабируемость: легко добавлять новые компоненты.
- Отказоустойчивость: сбои одного элемента не нарушают работу всей системы.
- Гибкость: управляемость через четко определенные протоколы.
Практические советы по реализации автоматов в Erlang
В ходе работы с автоматами в Erlang важно учитывать некоторые нюансы для повышения эффективности и качества реализации:
- Используйте gen_statem: этот behaviour идеально подходит для реализации автоматов с множеством состояний.
- Обеспечьте устойчивость: сохраняйте состояние автоматов на диск или в базу для восстановления после сбоев.
- Рекомендуемый паттерн входных данных: каждому состоянию — отдельный обработчик сообщений.
- Модульность: разбивайте логики на отдельные модули‚ чтобы обеспечить повторное использование и масштабируемость.
- Тестирование: автоматизируйте тесты переходов и сценариев‚ чтобы снизить риск ошибок.
Правильное применение этих рекомендаций позволит создавать надежные‚ расширяемые системы на базе конечных автоматов.
Выбор паттерна зависит от конкретных требований проекта. Если необходимо реализовать детерминированный автомат с четкими переходами — отлично подойдет паттерн "Модель состояниями". Для моделирования вероятностных процессов — стоит использовать "Стохастические модели". А если проект предполагает масштабируемость и распределенную работу — лучше всего подойдет "Модульный автомат".
Важно помнить‚ что правильная архитектура позволяет значительно упростить поддержку системы‚ увеличить ее отказоустойчивость и расширяемость. Erlang с его мощными механизмами процессов и сообщений, это идеальный язык для таких задач.
Что такое конечные автоматы и как их реализовать в Erlang для автоматизации бизнес-процессов?
Ответ: Конечные автоматы — это модели‚ которые описывают систему через множество состояний и правил перехода между ними. В Erlang их реализуют с помощью процессов‚ например‚ через behavior gen_statem‚ где каждое состояние — отдельная логическая часть с обработчиками сообщений. Такой подход позволяет создавать масштабируемые‚ отказоустойчивые системы‚ которые легко расширять и сопровождать.
Подробнее
| ЛСИ запросы | Обработка автоматов | Модели автоматов | Паттерны в Erlang | Практическое использование |
| автоматизация процессов в Erlang | реализация конечных автоматов | паттерны автоматов Erlang | автоматы в распределенных системах | примеры автоматов в Erlang |
| паттерны автоматов Erlang | автоматические системы на Erlang | конечные автоматы в бизнес-логике | модульные автоматы в Erlang | создание отказоустойчивых автоматов |